Przeciwna siła elektromotoryczna silnika synchronicznego z magnesami trwałymi
1. W jaki sposób powstaje siła elektromotoryczna zwrotna?
Generowanie wstecznej siły elektromotorycznej jest łatwe do zrozumienia. Zasada jest taka, że przewodnik przecina linie sił magnetycznych. Dopóki istnieje względny ruch między nimi, pole magnetyczne może być nieruchome, a przewodnik je przecina, lub przewodnik może być nieruchomy, a pole magnetyczne może się poruszać.
W przypadku silników synchronicznych z magnesami trwałymi ich cewki są zamocowane na stojanie (przewodniku), a magnesy trwałe są zamocowane na wirniku (polu magnetycznym). Gdy wirnik się obraca, pole magnetyczne generowane przez magnesy trwałe na wirniku będzie się obracać i zostanie przecięte przez cewki na stojanie, generując siłę elektromotoryczną zwrotną w cewkach. Dlaczego nazywa się to siłą elektromotoryczną zwrotną? Jak sama nazwa wskazuje, kierunek siły elektromotorycznej zwrotnej E jest przeciwny do kierunku napięcia zaciskowego U (jak pokazano na rysunku 1).
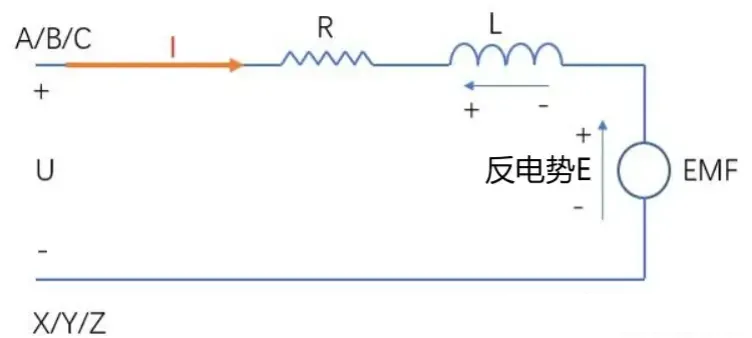
Rysunek 1
2. Jaki jest związek między siłą elektromotoryczną a napięciem końcowym?
Z rysunku 1 wynika, że zależność pomiędzy siłą elektromotoryczną zwrotną a napięciem na zaciskach pod obciążeniem jest następująca:
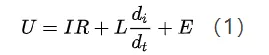
Test siły elektromotorycznej wstecznej jest zazwyczaj przeprowadzany w warunkach bez obciążenia, bez prądu i przy prędkości 1000 obr./min. Ogólnie rzecz biorąc, wartość 1000 obr./min jest definiowana jako współczynnik siły elektromotorycznej wstecznej = średnia wartość siły elektromotorycznej wstecznej/prędkość. Współczynnik siły elektromotorycznej wstecznej jest ważnym parametrem silnika. Należy zauważyć, że siła elektromotoryczna wsteczna pod obciążeniem stale się zmienia, zanim prędkość się ustabilizuje. Ze wzoru (1) możemy wiedzieć, że siła elektromotoryczna wsteczna pod obciążeniem jest mniejsza niż napięcie zaciskowe. Jeśli siła elektromotoryczna wsteczna jest większa niż napięcie zaciskowe, staje się generatorem i wyprowadza napięcie na zewnątrz. Ponieważ rezystancja i prąd w rzeczywistej pracy są małe, wartość siły elektromotorycznej wstecznej jest w przybliżeniu równa napięciu zaciskowemu i jest ograniczona przez wartość znamionową napięcia zaciskowego.
3. Znaczenie fizyczne siły elektromotorycznej zwrotnej
Wyobraź sobie, co by się stało, gdyby nie istniała siła elektromotoryczna? Z równania (1) możemy wywnioskować, że bez siły elektromotorycznej cały silnik jest równoważny czystemu rezystorowi, stając się urządzeniem generującym dużo ciepła, co jest sprzeczne z konwersją energii elektrycznej w energię mechaniczną przez silnik. W równaniu konwersji energii elektrycznej ,UJest to energia elektryczna wejściowa, taka jak energia elektryczna wejściowa do akumulatora, silnika lub transformatora; I2Rt to energia strat ciepła w każdym obwodzie, która jest rodzajem energii strat ciepła, im mniejsza tym lepiej; różnica między energią elektryczną wejściową a energią elektryczną strat ciepła. Jest to użyteczna energia odpowiadająca sile elektromotorycznej zwrotnej.
,UJest to energia elektryczna wejściowa, taka jak energia elektryczna wejściowa do akumulatora, silnika lub transformatora; I2Rt to energia strat ciepła w każdym obwodzie, która jest rodzajem energii strat ciepła, im mniejsza tym lepiej; różnica między energią elektryczną wejściową a energią elektryczną strat ciepła. Jest to użyteczna energia odpowiadająca sile elektromotorycznej zwrotnej. .Innymi słowy, siła elektromotoryczna wsteczna jest wykorzystywana do generowania użytecznej energii i jest odwrotnie proporcjonalna do utraty ciepła. Im większa energia utraty ciepła, tym mniejsza możliwa do osiągnięcia użyteczna energia.Obiektywnie rzecz biorąc, siła elektromotoryczna wsteczna zużywa energię elektryczną w obwodzie, ale nie jest to „strata”. Część energii elektrycznej odpowiadająca sile elektromotorycznej wstecznej zostanie przekształcona w użyteczną energię dla urządzeń elektrycznych, taką jak energia mechaniczna silników, energia chemiczna baterii itp.
.Innymi słowy, siła elektromotoryczna wsteczna jest wykorzystywana do generowania użytecznej energii i jest odwrotnie proporcjonalna do utraty ciepła. Im większa energia utraty ciepła, tym mniejsza możliwa do osiągnięcia użyteczna energia.Obiektywnie rzecz biorąc, siła elektromotoryczna wsteczna zużywa energię elektryczną w obwodzie, ale nie jest to „strata”. Część energii elektrycznej odpowiadająca sile elektromotorycznej wstecznej zostanie przekształcona w użyteczną energię dla urządzeń elektrycznych, taką jak energia mechaniczna silników, energia chemiczna baterii itp.
Z tego wynika, że wielkość siły elektromotorycznej zwrotnej oznacza zdolność urządzenia elektrycznego do przekształcenia całkowitej energii wejściowej w energię użyteczną, co odzwierciedla poziom zdolności przetwarzania urządzenia elektrycznego.
4. Od czego zależy wielkość siły elektromotorycznej zwrotnej?
Wzór obliczeniowy siły elektromotorycznej zwrotnej jest następujący: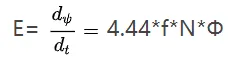
E to siła elektromotoryczna cewki, ψ to strumień magnetyczny, f to częstotliwość, N to liczba zwojów, a Φ to strumień magnetyczny.
Na podstawie powyższego wzoru sądzę, że każdy prawdopodobnie może wymienić kilka czynników, które wpływają na wielkość siły elektromotorycznej wstecznej. Oto artykuł podsumowujący:
(1) Przeciwna SEM jest równa szybkości zmiany strumienia magnetycznego. Im wyższa prędkość, tym większa szybkość zmiany i większa przeciwna SEM.
(2) Sam strumień magnetyczny jest równy liczbie zwojów pomnożonej przez strumień magnetyczny pojedynczego zwoju. Dlatego im większa liczba zwojów, tym większy strumień magnetyczny i większa siła elektromotoryczna.
(3) Liczba zwojów jest związana ze schematem uzwojenia, takim jak połączenie gwiazda-trójkąt, liczbą zwojów na żłobek, liczbą faz, liczbą zębów, liczbą gałęzi równoległych oraz schematem pełnego lub krótkiego skoku.
(4) Jednozwojowy strumień magnetyczny jest równy sile magnetomotorycznej podzielonej przez opór magnetyczny. Dlatego im większa siła magnetomotoryczna, tym mniejszy opór magnetyczny w kierunku strumienia magnetycznego i większa siła elektromotoryczna zwrotna.
(5) Opór magnetyczny jest związany z koordynacją szczeliny powietrznej i bieguna. Im większa szczelina powietrzna, tym większy opór magnetyczny i mniejsza siła elektromotoryczna. Koordynacja szczeliny biegunowej jest bardziej skomplikowana i wymaga szczegółowej analizy.
(6) Siła magnetomotoryczna jest związana z resztkowym magnetyzmem magnesu i efektywnym polem magnetycznym magnesu. Im większy resztkowy magnetyzm, tym wyższa siła elektromotoryczna. Efektywny pole magnetyczne jest związane z kierunkiem namagnesowania, rozmiarem i umiejscowieniem magnesu i wymaga szczegółowej analizy.
(7) Magnetyzm szczątkowy jest związany z temperaturą. Im wyższa temperatura, tym mniejsza siła elektromotoryczna.
Podsumowując, czynniki wpływające na siłę elektromotoryczną zwrotną obejmują prędkość obrotową, liczbę zwojów na szczelinę, liczbę faz, liczbę gałęzi równoległych, pełny skok i krótki skok, obwód magnetyczny silnika, długość szczeliny powietrznej, dopasowanie biegunów do szczelin, szczątkowy magnetyzm stali magnetycznej, rozmieszczenie i rozmiar stali magnetycznej, kierunek namagnesowania stali magnetycznej oraz temperaturę.
5. Jak dobrać wielkość siły elektromotorycznej zwrotnej przy projektowaniu silnika?
W projektowaniu silnika, siła elektromotoryczna E jest bardzo ważna. Jeśli siła elektromotoryczna E jest dobrze zaprojektowana (odpowiedni rozmiar, niskie zniekształcenie przebiegu), silnik jest dobry. Siła elektromotoryczna E ma kilka głównych efektów na silnik:
1. Wielkość siły elektromotorycznej (SEM) określa słaby punkt magnetyczny silnika, a słaby punkt magnetyczny określa rozkład mapy sprawności silnika.
2. Współczynnik zniekształceń przebiegu siły elektromotorycznej (SEM) wpływa na moment tętnienia silnika i płynność momentu obrotowego podczas pracy silnika.
3. Wielkość siły elektromotorycznej (SEM) bezpośrednio określa współczynnik momentu obrotowego silnika, a współczynnik siły elektromotorycznej (SEM) jest proporcjonalny do współczynnika momentu obrotowego.
Z tego wynikają następujące sprzeczności w konstrukcji silnika:
a. Gdy siła elektromotoryczna przeciwna jest duża, silnik może utrzymywać wysoki moment obrotowy przy granicznym prądzie sterownika w obszarze pracy przy niskiej prędkości, ale nie może wytworzyć momentu obrotowego przy dużej prędkości, a nawet nie może osiągnąć oczekiwanej prędkości;
b. Gdy siła elektromotoryczna jest mała, silnik nadal ma moc wyjściową w obszarze dużej prędkości, ale momentu obrotowego nie można osiągnąć przy takim samym natężeniu prądu sterownika przy niskiej prędkości.
6. Pozytywny wpływ siły elektromotorycznej (SEM) na silniki z magnesami trwałymi.
Istnienie siły elektromotorycznej jest bardzo ważne dla działania silników z magnesami trwałymi. Może przynieść pewne korzyści i specjalne funkcje silnikom:
a. Oszczędność energii
Przeciwskazanie EMF generowane przez silniki z magnesami trwałymi może zmniejszyć prąd silnika, zmniejszając w ten sposób straty mocy i energii oraz osiągając cel oszczędzania energii.
b. Zwiększ moment obrotowy
Przeciwna siła elektromotoryczna (EMF) jest przeciwna do napięcia zasilania. Gdy prędkość silnika wzrasta, przeciwna siła elektromotoryczna również wzrasta. Odwrotne napięcie zmniejszy indukcyjność uzwojenia silnika, co spowoduje wzrost prądu. Pozwala to silnikowi na generowanie dodatkowego momentu obrotowego i poprawę wydajności mocy silnika.
c. Odwrotne zwalnianie
Po utracie mocy przez silnik z magnesami trwałymi, wskutek występowania siły elektromotorycznej zwrotnej, może on nadal generować strumień magnetyczny i powodować dalszy obrót wirnika, co powoduje powstanie siły elektromotorycznej zwrotnej o prędkości odwrotnej. Jest to bardzo przydatne w niektórych zastosowaniach, takich jak obrabiarki i inny sprzęt.
Krótko mówiąc, siła elektromotoryczna wsteczna jest niezbędnym elementem silników z magnesami trwałymi. Przynosi wiele korzyści silnikom z magnesami trwałymi i odgrywa bardzo ważną rolę w projektowaniu i produkcji silników. Wielkość i kształt fali siły elektromotorycznej wstecznej zależą od takich czynników, jak projekt, proces produkcyjny i warunki użytkowania silnika z magnesami trwałymi. Wielkość i kształt fali siły elektromotorycznej wstecznej mają istotny wpływ na wydajność i stabilność silnika.
Anhui Mingteng Permanent Magnet Electromechanical Equipment Co., Ltd. (https://www.mingtengmotor.com/)jest profesjonalnym producentem silników synchronicznych z magnesami trwałymi. Nasze centrum techniczne zatrudnia ponad 40 pracowników działu badawczo-rozwojowego, podzielonych na trzy działy: projektowania, przetwarzania i testowania, specjalizujących się w badaniach i rozwoju, projektowaniu i innowacjach procesowych silników synchronicznych z magnesami trwałymi. Korzystając z profesjonalnego oprogramowania projektowego i samodzielnie opracowanych specjalnych programów projektowych silników z magnesami trwałymi, podczas procesu projektowania i produkcji silnika, rozmiar i kształt fali siły elektromotorycznej zwrotnej zostaną starannie rozważone zgodnie z rzeczywistymi potrzebami i konkretnymi warunkami pracy użytkownika, aby zapewnić wydajność i stabilność silnika oraz poprawić efektywność energetyczną silnika.
Prawa autorskie: ten artykuł jest przedrukiem publicznego numeru WeChat „电机技术及应用”, oryginalny link https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
Niniejszy artykuł nie reprezentuje poglądów naszej firmy. Jeśli masz inne zdanie lub poglądy, popraw nas!
Czas publikacji: 20-08-2024